L'achat de filament est un budget non négligeable, surtout si l'on souhaite
une grande variété de type de filament (PLA, PETG, ...) et de couleurs.
Nous avons donc lancé l'achat de bobines de 8 kg dont le prix de revient au mètre est moindre. C'est aussi pratique en alimentation extérieure (sans utiliser l'AMS) pour réaliser de grandes séries de pièces demandant beaucoup de filament.
Par contre, ces grandes bobines ne sont bien sûr par compatible avec l'AMS et il faut donc rebobiner depuis la grande bobine sur une bobine standard de 1 kg.
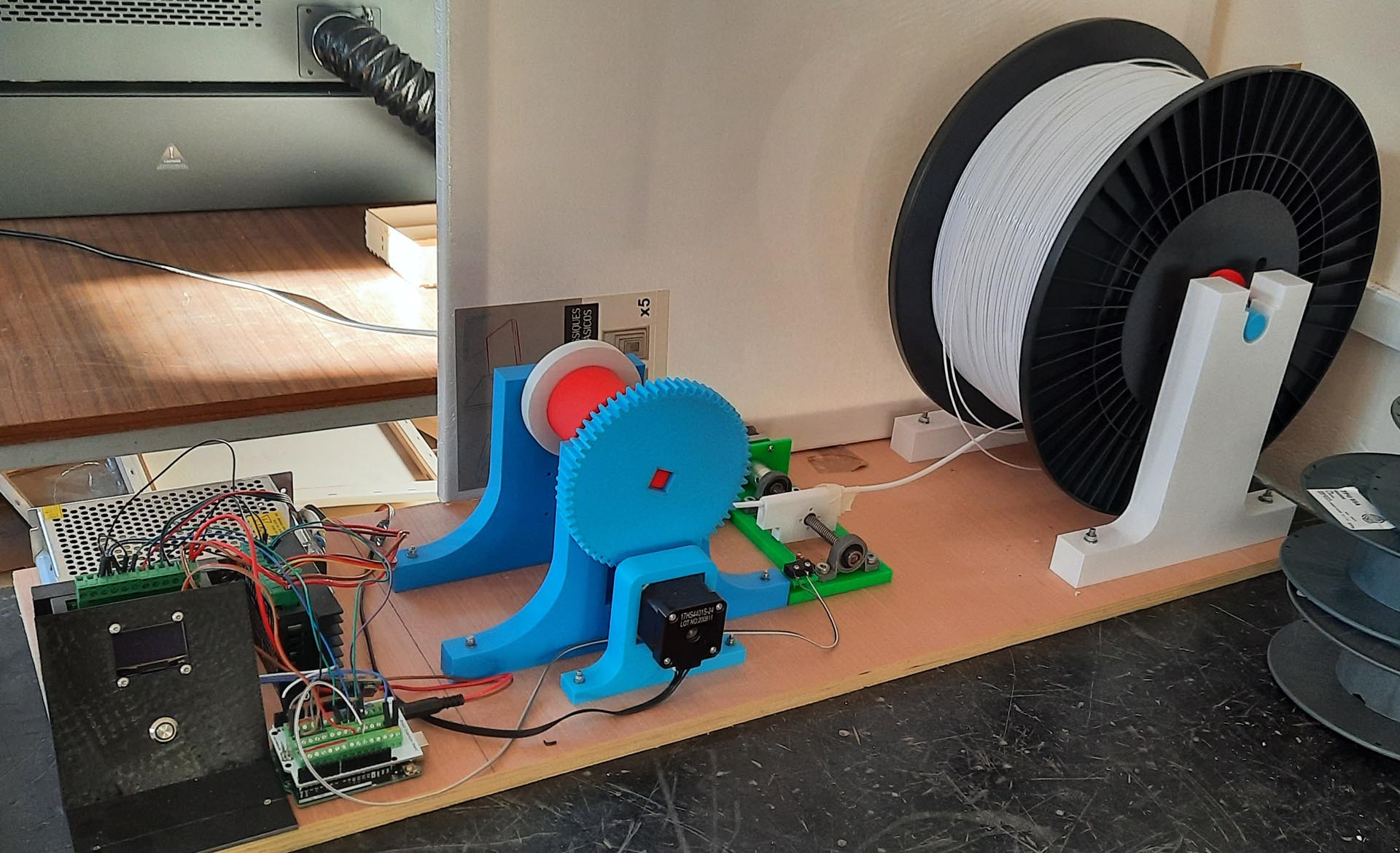
Le projet consiste à réaliser un enrouleur de filament.
Nous avons donc lancé l'achat de bobines de 8 kg dont le prix de revient au mètre est moindre. C'est aussi pratique en alimentation extérieure (sans utiliser l'AMS) pour réaliser de grandes séries de pièces demandant beaucoup de filament.
Par contre, ces grandes bobines ne sont bien sûr par compatible avec l'AMS et il faut donc rebobiner depuis la grande bobine sur une bobine standard de 1 kg.
Le projet consiste à réaliser un enrouleur de filament.
Après une recherche sur le WEB, nous avons rassemblé plusieurs idées et concu notre propre
modèle.
La partie mécanique a été modélisée dans Fusion.
L'ensemble des pièces a été réalisé en impression 3D en PLA.
Le montage est fixé sur une plaque de contre-plaqué qui assure rigidité et stabilité.
La partie mécanique a été modélisée dans Fusion.
L'ensemble des pièces a été réalisé en impression 3D en PLA.
Le montage est fixé sur une plaque de contre-plaqué qui assure rigidité et stabilité.

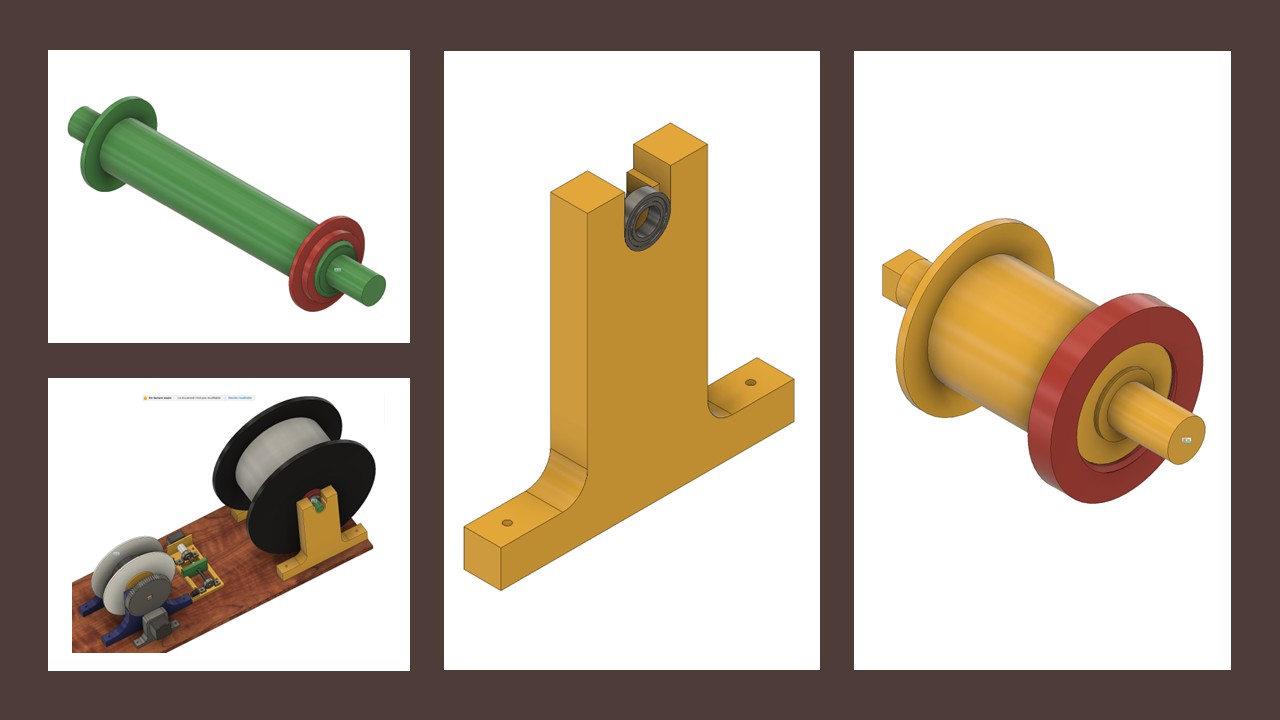
L'axe de la grande bobine est monté sur roulement à billes pour faciliter le déroulement.
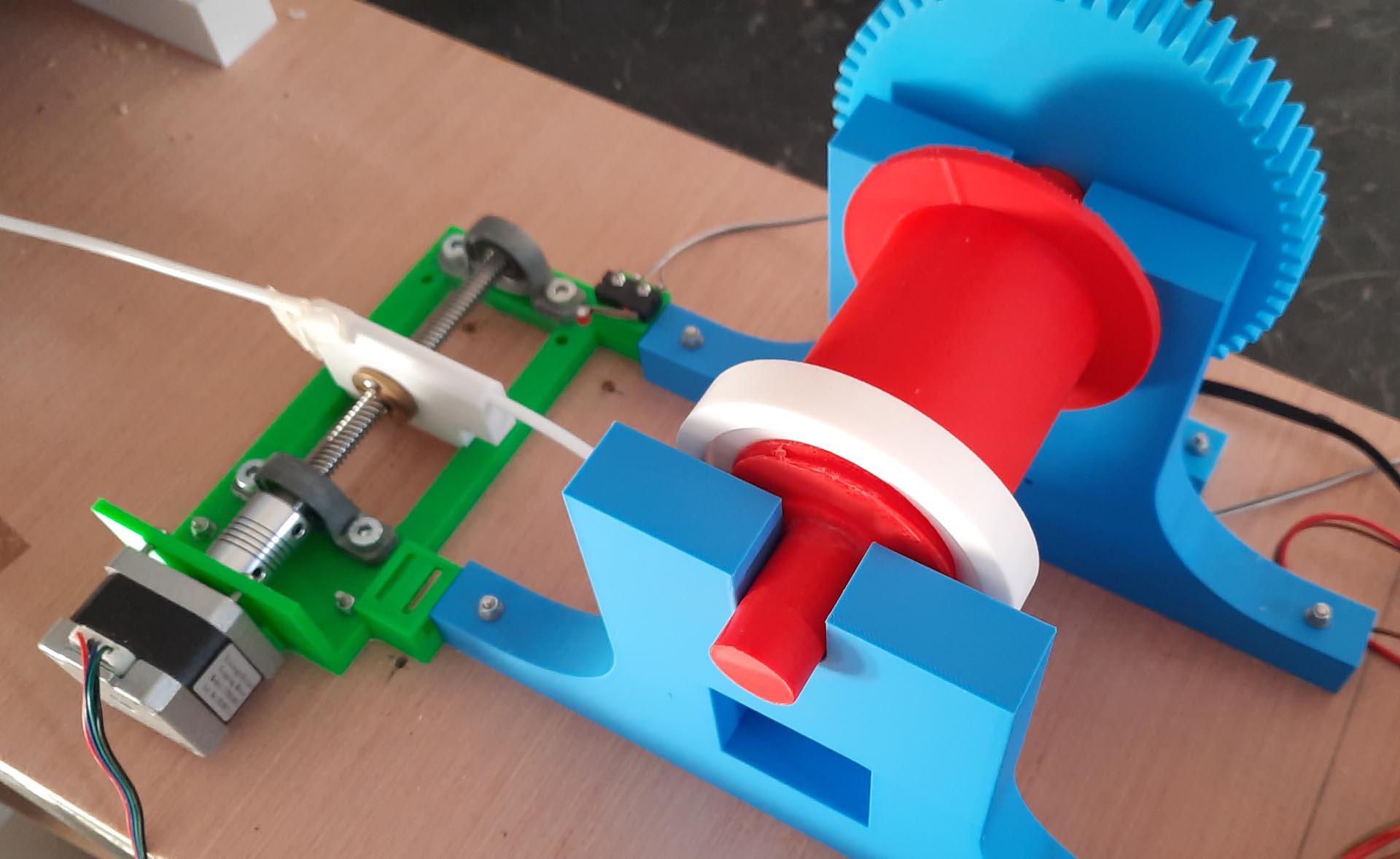
L'axe de la petite bobine posséde un carré permettant de monter légèrement à force le grand engrenage.
Le diamètre de cet axe doit être adapté au diamètre de la bobine réceptrice.
Ici, pas de roulement à billes, l'effort est faible.
L'axe de la petite bobine posséde un carré permettant de monter légèrement à force le grand engrenage.
Le diamètre de cet axe doit être adapté au diamètre de la bobine réceptrice.
Ici, pas de roulement à billes, l'effort est faible.
L'entrainement de la petite bobine et de la navette est réalisé par deux moteurs pas à pas
NEMA 17.
La navette est entrainée par une vis sans fin qui assure le mouvement rectiligne.
Un fin de course permet de rechercher en début de programme une position zéro quelque soit la position de départ de la navette.
La navette est entrainée par une vis sans fin qui assure le mouvement rectiligne.
Un fin de course permet de rechercher en début de programme une position zéro quelque soit la position de départ de la navette.
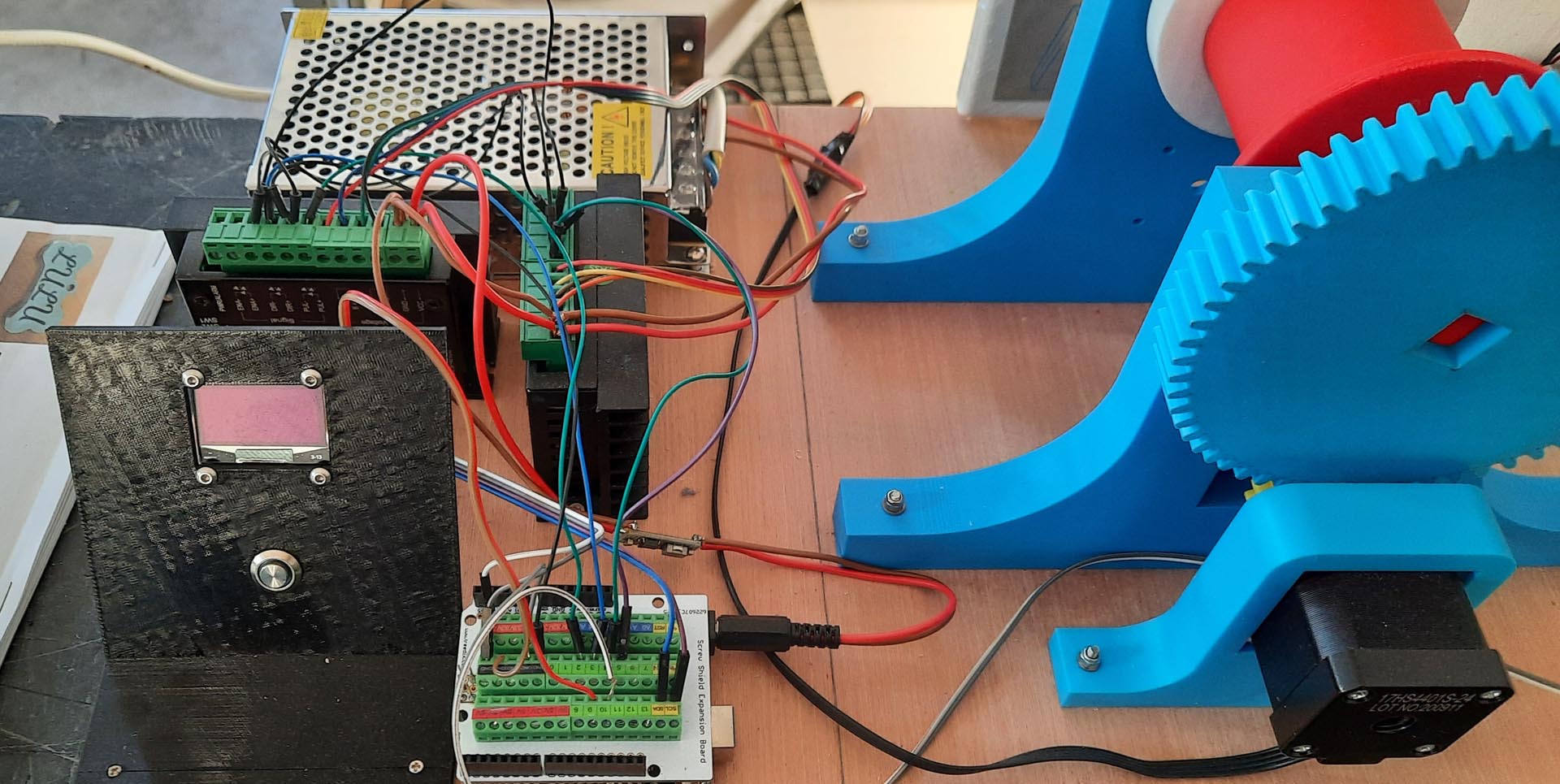
Les deux moteurs pas à pas sont alimentés par des drivers TB6600.
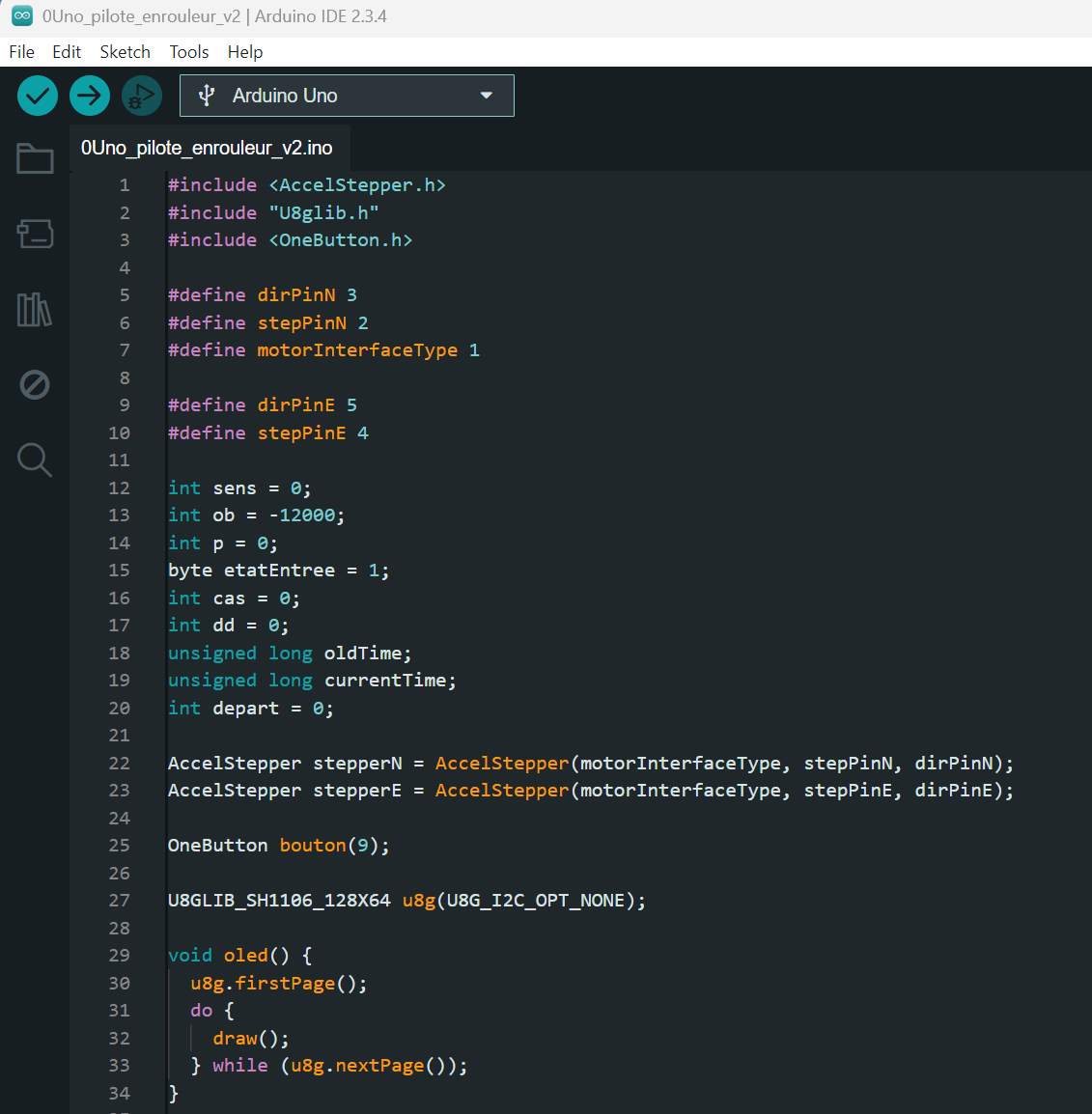
Le pilotage est assurée par un Arduino UNO. Au nniveau des entrées sorties :
L'ensemble est alimenté par une alimentation 12V.
Un petit circuit abaisseur de tension produit le 5V nécessaire à l'Arduino.
- Il pilote les deux drivers TB6600
- Il lit la position du fin de course
- Il détecte l'appui sur le bouton de contrôle
- Il affiche enfin les infos à l'écran
L'ensemble est alimenté par une alimentation 12V.
Un petit circuit abaisseur de tension produit le 5V nécessaire à l'Arduino.
Au niveau logiciel, plusieurs essais ont permis de déterminer
la vitesses de rotation de la petite bobine et la vitesse de translation de la navette.
A partir de la position zéro, le moteur tourne un certain nombre de pas puis le sens de rotation du moteur est inversé pour le même nombre de pas.
Le logicel utilise la librairie 'AccelStepper' pour le contrôle des moteurs pas à pas.Cette bibliothèque permet de contrôler l'accélération.
A partir de la position zéro, le moteur tourne un certain nombre de pas puis le sens de rotation du moteur est inversé pour le même nombre de pas.
Le logicel utilise la librairie 'AccelStepper' pour le contrôle des moteurs pas à pas.Cette bibliothèque permet de contrôler l'accélération.
×
![]()