Lancé début septembre, le challenge 'Robot suiveur de ligne' a pour but de concevoir et réaliser un robot capable
de suivre une ligne noire tracée sur un fond blanc. Le robot doit être autonome, c'est-à-dire qu'il ne doit pas
être télécommandé. Il doit être capable de détecter la ligne et de s'y ajuster en permanence pour la suivre
le plus rapidement possible.
Pour relever ce défi, les adhérents doivent utiliser des capteurs de couleur pour détecter la ligne noire et
des moteurs pour déplacer le robot. Ils doivent également programmer un algorithme de contrôle qui permet au
robot de réagir aux changements de direction de la ligne et d'ajuster sa trajectoire en conséquence.
Plusieurs adhérents ont répondu présent à ce challenge et ont déjà commencé à travailler sur leurs robots.
Ils partagent leurs progrès et leurs idées lors des sessions du lundi soir du club, où ils peuvent également
bénéficier de l'aide et des conseils des autres membres.
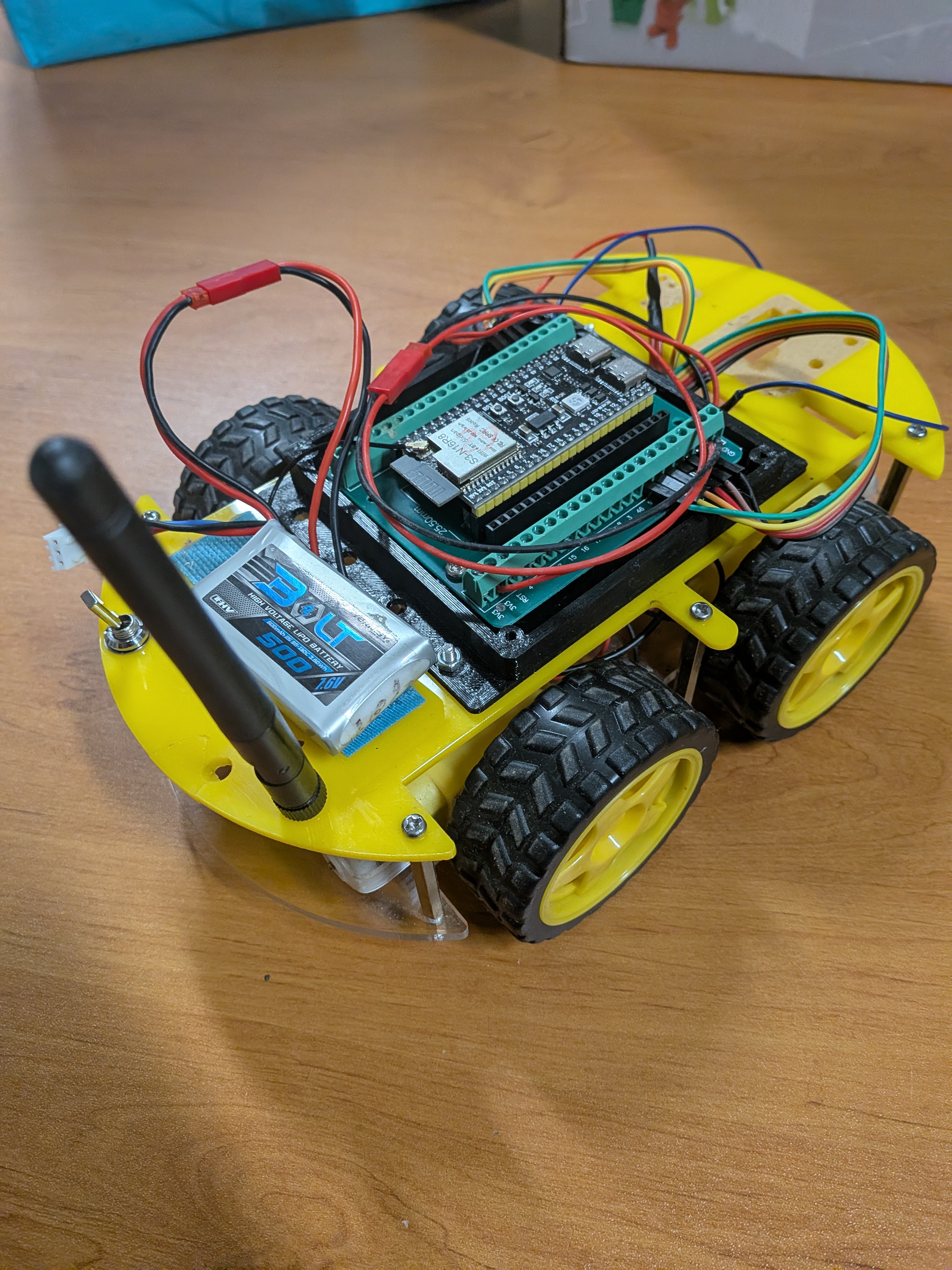
Le premier robot de Hervé utilise un capteur à 3 diodes, un microcontrôleur ESP32, et une programmation en langage C++. Il possède 4 roues motrices.
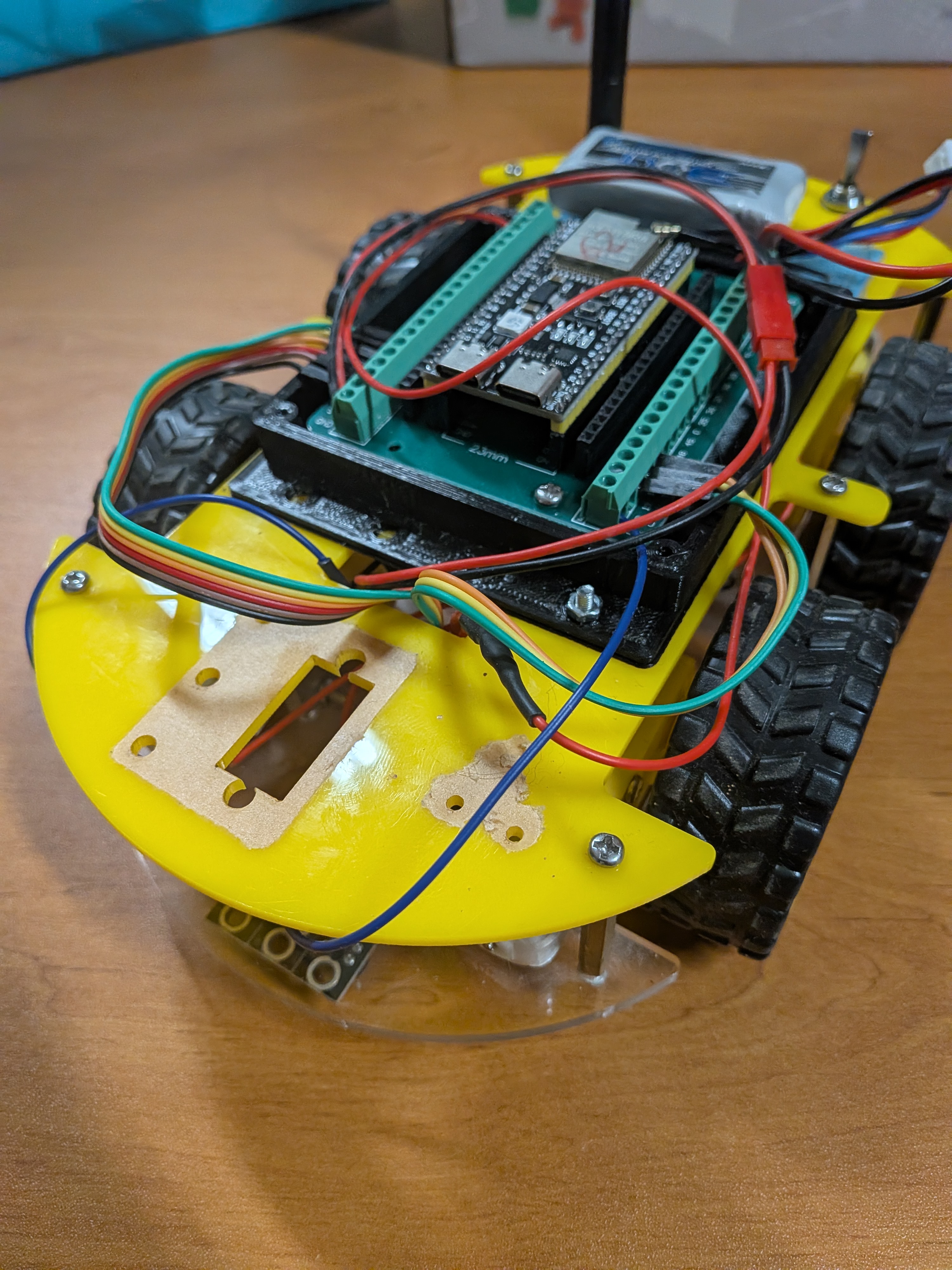
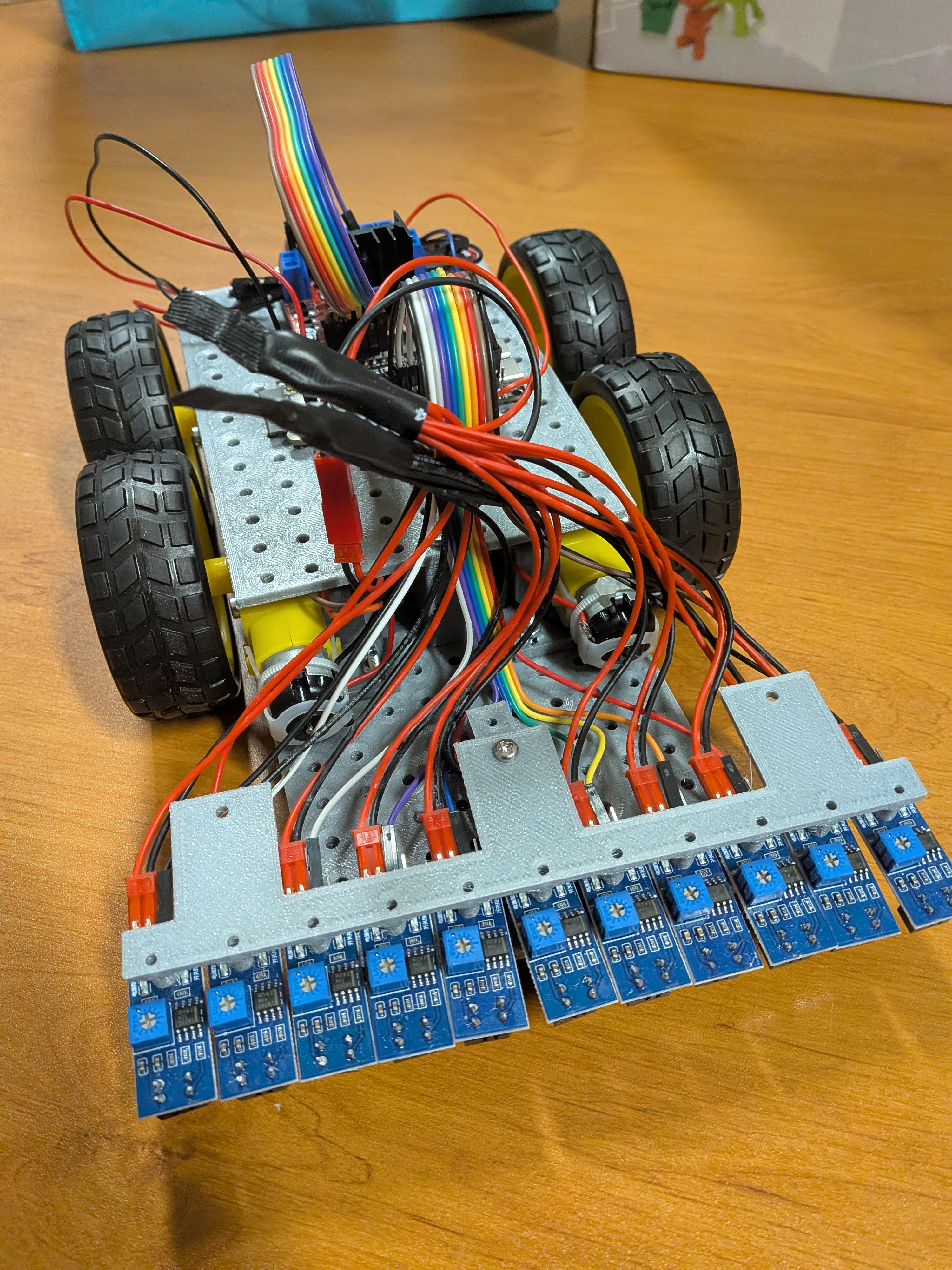
La deuxième version a évolué avec un capteur à 10 diodes pour une détection plus fine. Il utilise toujours un microcontrôleur ESP32 et une programmation en C++. Il possède aussi 4 roues motrices.
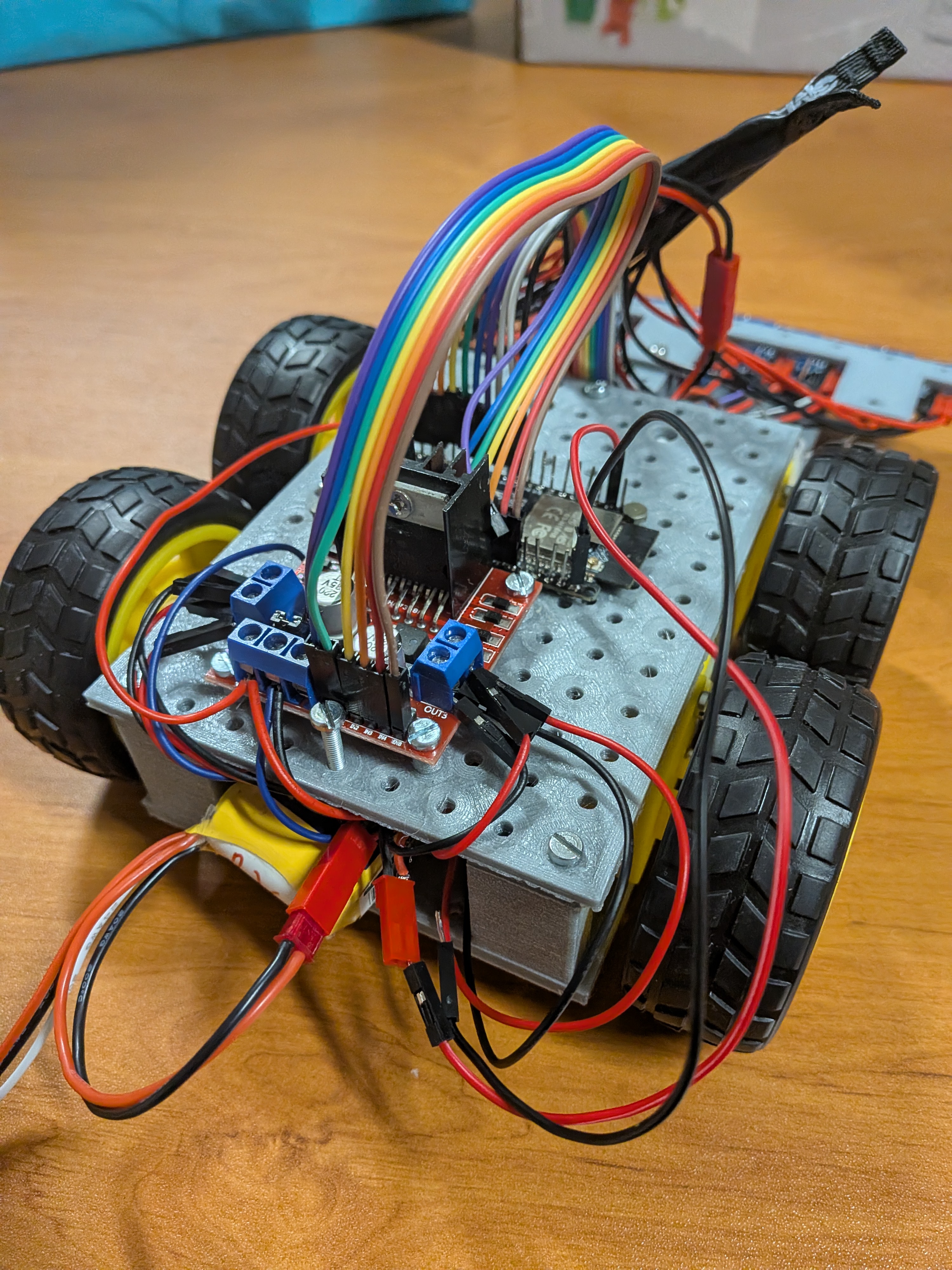
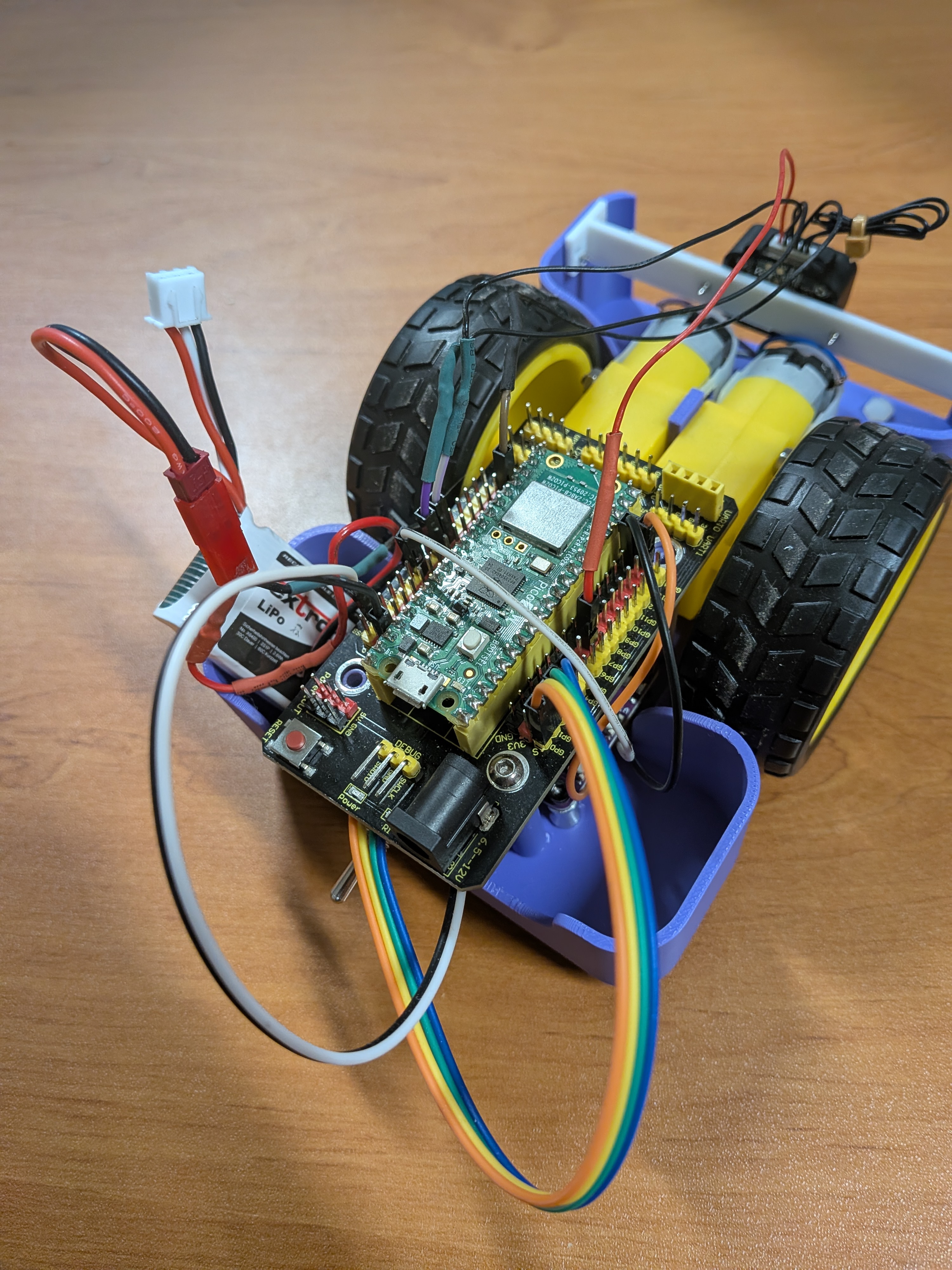
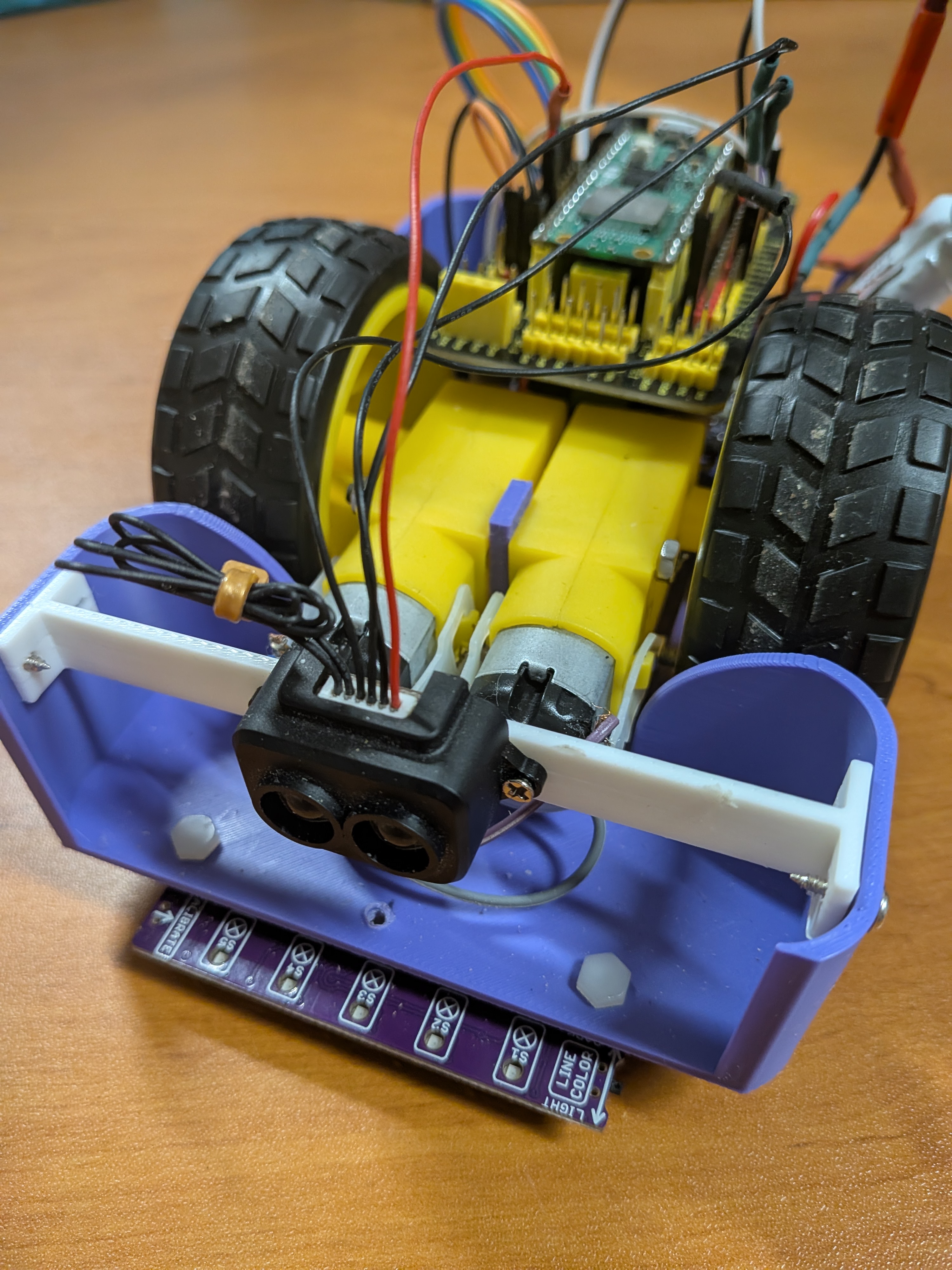
Le premier robot de Jean-Louis a été réalisé avec un capteur à 5 diodes. Il utilise un microcontrôleur Raspberry Pico2W et une programmation en langage MicroPython. Il n'a que deux roues motrices.
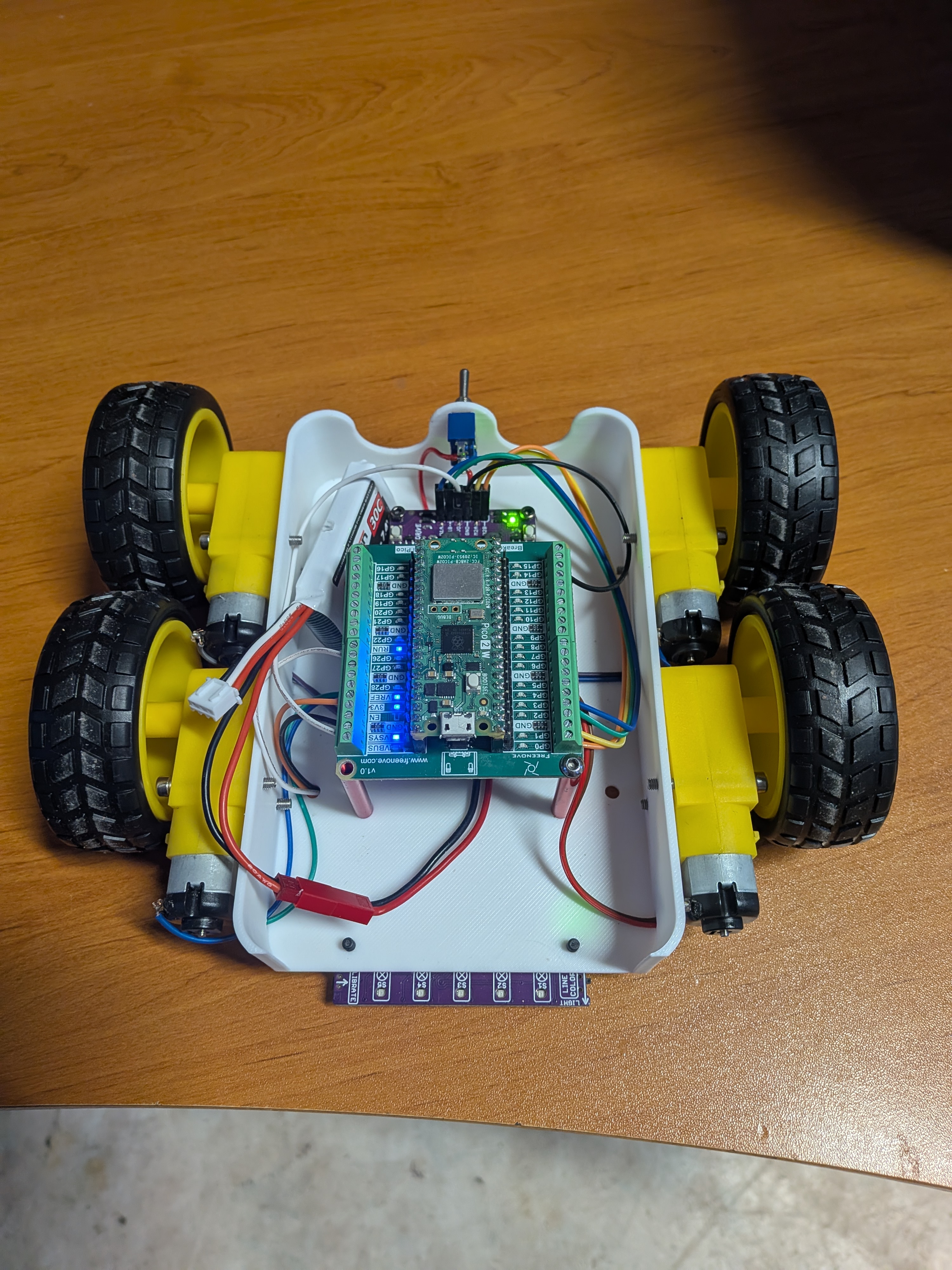
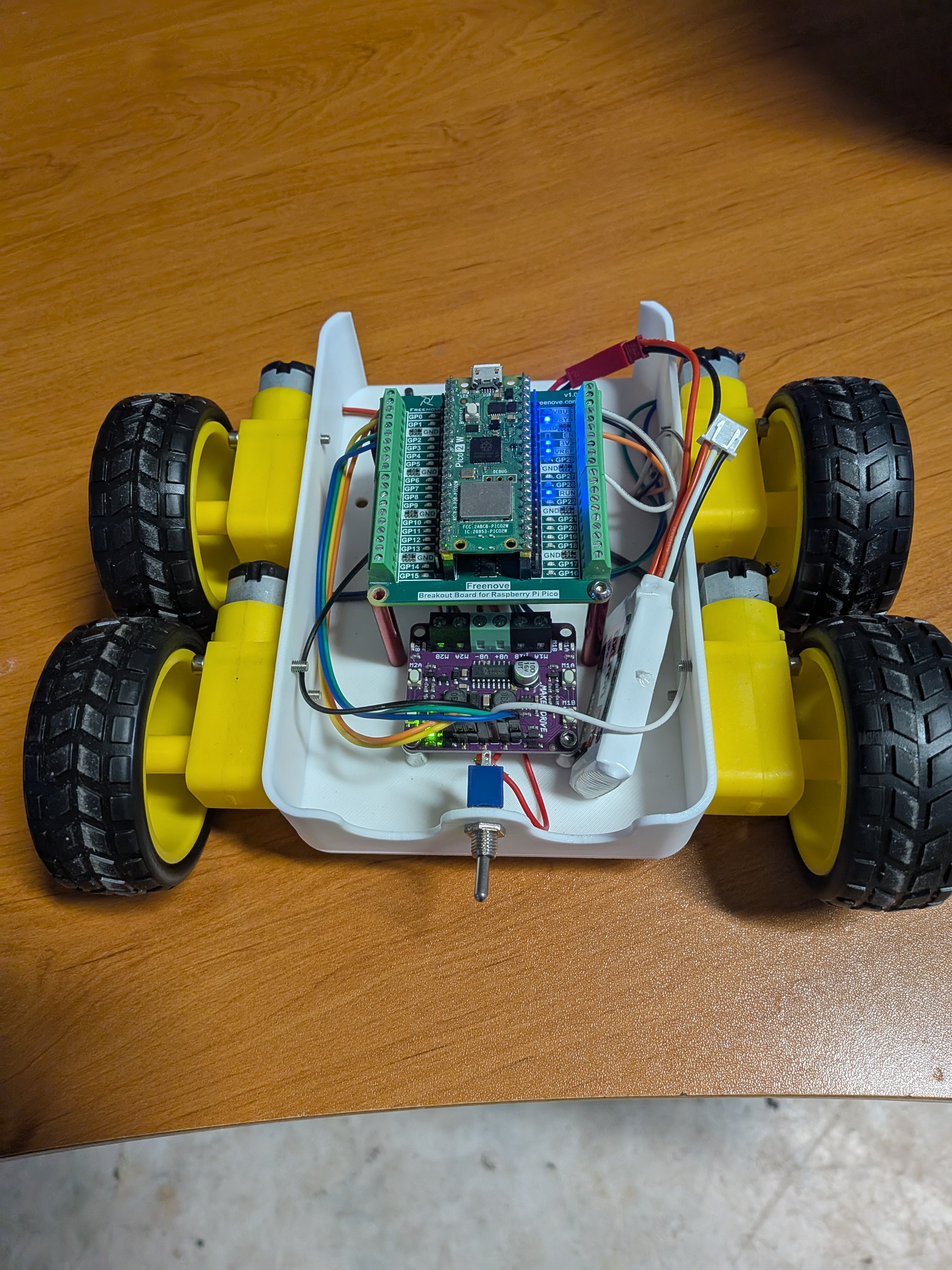
Le deuxièmerobot de Jean-Louis garde le capteur à 5 diodes et le microcontrôleur Raspberry Pico2W. Il a maintenant quatre roues motrices.
A gauche, vidéo montrant deux robots en action
A droite, Vidéo montrant un robot avec algorithme de recherche de ligne